Ciele
- Zobraziť graficky jednoduchú sústavu dvoch nelineárnych rovníc o dvoch neznámych.\(\def\a{&}\)
- Naučiť sa používať Newtonovu metódu na riešenie sústav nelineárnych rovníc.
Úvod
-
Systémy nelineárnych rovníc sa vyskytujú pri riešení mnohých technických (inžinierskych) úloh.
Ako príklad môžeme uviesť určenie lokálnych extrémov funkcií \(n\) premenných. Nutnou podmienkou lokálneho extrému diferencovateľnej
funkcie je nulový gradient funkcie v bode extrému, t. j. \(n\) zložiek gradientu musí byť súčasne rovných nule.
- Analýza existencie koreňov sústavy rovníc, ich počtu a podľa možnosti odhadu oblastí (obdĺžnikov), v ktorých ležia jednotlivé korene.
- Použitie iteračných postupov, umožňujúcich postupné upresňovanie približných riešení.
- Odhad [ne]presnosti priebežného/výsledného numerického riešenia.
Na numerické riešenie konkrétnych sústav nelineárnych rovníc môžeme použiť, napríklad Newtonovu metódu, ktorá je tiež nazývaná metódou linearizácie. V každom kroku, t. j. pri každej iterácii, sa rieši pomocná sústava lineárnych rovníc.
Riešenie jednoduchej sústavy dvoch nelineárnych rovníc môžeme symbolicky rozdeliť na tri podúlohy:
Ak Newtonovu metódu zapíšeme vo vektorovom tvare \[ \begin{array}{l} 1)\quad \vec{f}^{\prime}(\vec{x}^{[k]})\cdot \Delta \vec{x}^{[k]}=- \vec{f}(\vec{x}^{[k]}),\\[1ex] 2)\quad \vec{x}^{[k+1]}=\vec{x}^{[k]}+\Delta \vec{x}^{[k]},\\ \end{array} \] tak prakticky jedinou záhadou je člen \(\vec{f}^{\prime}(\vec{x}^{[k]})\). Ako treba chápať deriváciu vektora, keď máme \(n\) premenných? Derivácie \(n\) funkcií podľa \(n\) neznámych je potrebné zapísať do matice, ktorá sa nazýva Jacobiova matica: \[ \vec{f}^{\prime}(\vec{x}^{[k]}) \stackrel{\mathrm{def}}{=}\left[ \begin{array}{cccc} \frac{\partial f_1}{\partial x_1} \a \frac{\partial f_1}{\partial x_2} \a \cdots \a \frac{\partial f_1}{\partial x_n} \\[1ex] \frac{\partial f_2}{\partial x_1} \a \frac{\partial f_2}{\partial x_2} \a \cdots \a\frac{\partial f_2}{\partial x_n} \\[1ex] \vdots \a \vdots \a \ddots \a \vdots \\[1ex] \frac{\partial f_n}{\partial x_1} \a \frac{\partial f_n}{\partial x_2} \a \cdots \a\frac{\partial f_n}{\partial x_n} \\[1ex] \end{array} \right]_{\vec{x}=\vec{x}^{[k]}}=J(\vec{x}^{[k]}). \] Stredný zápis treba chápať v tom zmysle, že sa jednotlivé rovnice najprv zderivujú podľa jednotlivých premenných a potom sa dosadia aktuálne hodnoty premenných – vektora \(\vec{x}_n\).
Iteračný proces Newtonovej metódy teda zapíšeme v maticovom tvare: \[ \begin{array}{l} 1)\quad J(\vec{x}^{[k]})\cdot \Delta \vec{x}^{[k]}=- \vec{f}(\vec{x}^{[k]}),\\[1ex] 2)\quad \vec{x}^{[k+1]}=\vec{x}^{[k]}+\Delta \vec{x}^{[k]}, \end{array} \] V každom kroku sa teda určí nová Jacobiova matica sústavy \(J(\vec{x}^{[k]})\) a nový vektor pravej strany \(-\vec{f}(\vec{x}^{[k]})\), ktorý získame dosadením aktuálnych hodnôt do jednotlivých rovníc, pričom výsledné hodnoty vynásobíme znamienkom mínus.
Poznámka:
V prípade približného riešenia sústav nelineárnych rovníc nemáme k dispozícii také jednoduché postupy
na zabezpečenie dosiahnutia požadovanej presnosti \(\varepsilon\), ako sme to videli v prípade riešenia
jednej nelineárnej rovnice \(f(x)=0\) Newtonovou metódou v predchádzajúcich cvičeniach. V prípade riešenia
sústavy s presnosťou \(\varepsilon\) výpočet zastavíme, ak bude norma (veľkosť) prírastku \(\Delta \vec{x}^{[k]}\)
menšia ako \(\varepsilon\), t. j. \(\Vert\Delta \vec{x}^{[k]}\Vert_{\infty}\lt\varepsilon\) (ohľadom normy viď cvičenie 2).
Postup
-
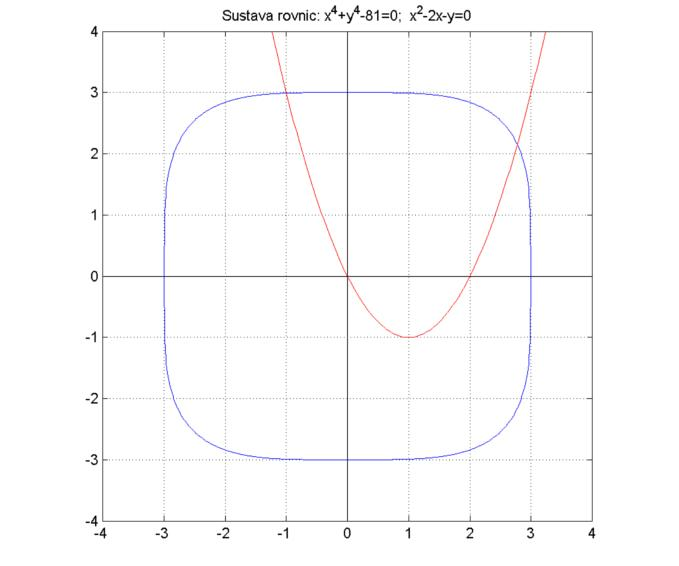
Pri analýze najjednoduchších sústav dvoch nelineárnych rovníc je možné použitie grafických metód.Príklad: Určme počet riešení sústavy nelineárnych rovníc \[ \begin{array}{r} x^4+y^4-81=0,\\ x^2-2x-y=0. \end{array} \] a separujme všetky korene.
-
V tejto časti sa zoznámime s použitím Newtonovej metódy na spresňovanie bodov – aproximácií riešení sústav nelineárnych rovníc.Príklad: Pre sústavu nelineárnych rovníc \[ \begin{array}{r} x^4+y^4-81=0,\\ x^2-2x-y=0. \end{array} \] upresnite pomocou jedného kroku Newtonovej metódy odhadnuté začiatočné hodnoty všetkých koreňov.Poznámka: Newtonova metóda sa v prípade dobrej začiatočnej aproximácie prejavuje ako rýchle konvergujúca (jedná sa o metódu s tzv. kvadratickou rýchlosťou konvergencie). V nasledujúcich dvoch tabuľkách uvádzame výsledky, ktoré sme získali v Matlabe/Octave pomocou opakovania nasledujúcich príkazov umiestnených na jeden riadok:
J=[4*x(1)^3, 4*x(2)^3;2*x(1)-2,-1], f=[x(1)^4+x(2)^4-81; x(1)^2-2*x(1)-x(2)], dx=-inv(J)*f, x=x+dx \[ \begin{array}{|r|c|c|c|c|} \hline k\a x_{1}^{[k]} \a y_{1}^{[k]} \a f_1(\vec{x}_{1}^{[k]}) \a f_2(\vec{x}_{1}^{[k]}) \\ \hline 0\a 2{,}700000000000000 \a 2{,}200000000000000 \a -4{,}4303 \a -0{,}31 \\ \hline 1\a 2{,}778882711653324 \a 2{,}158201219621302 \a 0{,}327608523 \a 0{,}006222482 \\ \hline 2\a 2{,}776358337288419 \a 2{,}155442569988142 \a 0{,}000507577 \a 0{,}000006372 \\ \hline 3\a 2{,}776354990216047 \a 2{,}155437051254248 \a 1{,}367 \cdot 10^{-9} \a 0{,}011 \cdot 10^{-9}\\ \hline 4\a 2{,}776354990208079 \a 2{,}155437051237144 \a 1{,}421 \cdot 10^{-14} \a 0 \\ \hline \end{array} \] \[ \begin{array}{|r|c|c|c|c|} \hline k\a x_{2}^{[k]} \a y_{2}^{[k]} \a f_1(\vec{x}_{2}^{[k]}) \a f_2(\vec{x}_{2}^{[k]}) \\ \hline 0\a -1 \a 3 \a 1 \a 0 \\ \hline 1\a -0{,}997706422018349 \a 2{,}990825688073394 \a 0{,}004567328 \a 0{,}000005260 \\ \hline 2\a -0{,}997694533482717 \a 2{,}990783448965392 \a 9{,}660 \cdot 10^{-8}\a 0{,}014 \cdot 10^{-8} \\ \hline 3\a -0{,}997694533223806 \a 2{,}990783448072278 \a 2{,}842 \cdot 10^{-14} \a 0 \\ \hline \end{array} \] Nuly v pravom dolnom rohu obidvoch tabuliek sú výsledky, ktoré vypísal použitý program. Je pravdepodobné, že odpovedajúce hodnoty ľavých strán druhej rovnice sústavy sú malé nenulové hodnoty.Poznámka: V tomto prípade sme mohli namiesto sústavy nelineárnych rovníc prejsť na riešenie nasledujúcej algebrickej rovnice 8. rádu: \[ x^8-8x^7+24x^6-32x^5+17x^4-81=0, \] ktorú môžeme získať tak, že z druhej rovnice sústavy vyjadríme \(y=x^2-2x\) a tento výraz dosadíme do prvej rovnice.
V prípade zložitejších nelineárnych sústav však je takýto postup možný len výnimočne.
Pri pohľade na algebrickú rovnicu tiež nie je jasné, koľko reálnych koreňov má a kde sa nachádzajú. Použitím príkazu
roots([1 -8 24 -32 17 0 0 0 -81])
v programe Matlab/Octave dostaneme nasledujúce výsledky: \[ \begin{array}{l} \phantom{-} 2.776354990208112 \\ \phantom{-} 2.568708345457808 + 0.978208721044785i\\ \phantom{-} 2.568708345457808 - 0.978208721044785i\\ \phantom{-} 0.981203232720892 + 1.436060637512282i\\ \phantom{-} 0.981203232720892 - 1.436060637512282i\\ -0.439241806670853 + 1.042383788608000i\\ -0.439241806670853 - 1.042383788608000i\\ -0.997694533223805 \end{array} \] Algebrická rovnica má práve 2 reálne korene, ktoré sa s vysokou presnosťou zhodujú s hodnotami \(x_{1}^{[4]}\) a \(x_{2}^{[3]}\) získanými Newtonovou metódou na riešenie sústav nelineárnych rovníc.Príklad: S presnosťou \(\varepsilon=0{,}01\) riešte v \(\mathbb{R} \times \mathbb{R}\) sústavu rovníc \[\begin{array}{l} x^2+ y^2 -1 = 0,\\ x\cdot\cos x - y = 0. \\ \end{array}\]
Zdroje
- Buša, Pirč, Schrötter: Numerické metódy, pravdepodobnosť a matematická štatistika, 2006, ISBN 80-8073-632-4. Je možné stiahnuť obrazovkovú alebo tlačovú verziu.
- Daňo, Ostertagová: Vybrané kapitoly z numerických metód, pravdepodobnosti a matematickej štatistiky, Equilibria s.r.o., Košice, 2012, ISBN 978-80-8143-012-1.
Doplňujúce úlohy
Úloha:
S presnosťou \(0{,}01\) riešte v \(\mathbb{R} \times \mathbb{R}\) sústavu rovníc
\[\begin{array}{l}
x^2 y^2 - 3x^3 - 6 y^3 + 8 = 0,\\
x^4 - 9 y + 2 = 0. \\
\end{array}\]
Úloha:
S presnosťou \(0{,}01\) riešte v \(\mathbb{R} \times \mathbb{R}\) sústavu rovníc
\[\begin{array}{l}
\sin x - y = 1{,}32,\\
\cos y - x = -0{,}85. \\
\end{array}\]
Úloha:
S presnosťou \(0{,}01\) riešte v \(\mathbb{R} \times \mathbb{R}\) sústavu rovníc
\[\begin{array}{l}
(x - 1{,}2)^2 + (y - 0{,}6)^2 = 1,\\
4{,}2 x^2 + 8{,}8 y^2 = 1{,}42. \\
\end{array}\]
Úloha:
S presnosťou \(0{,}01\) riešte v \(\mathbb{R} \times \mathbb{R}\) sústavu rovníc
\[\begin{array}{l}
x^3 - y^2 - 1 = 0,\\
x y^3 - y - 4 = 0. \\
\end{array}\]
Úloha:
S presnosťou \(0{,}01\) riešte v \(\mathbb{R} \times \mathbb{R}\) sústavu rovníc
\[\begin{array}{l}
\mathrm{e}^{xy} - x^2 + y = 0,\\
x^2 + y^2 = 4. \\
\end{array}\]